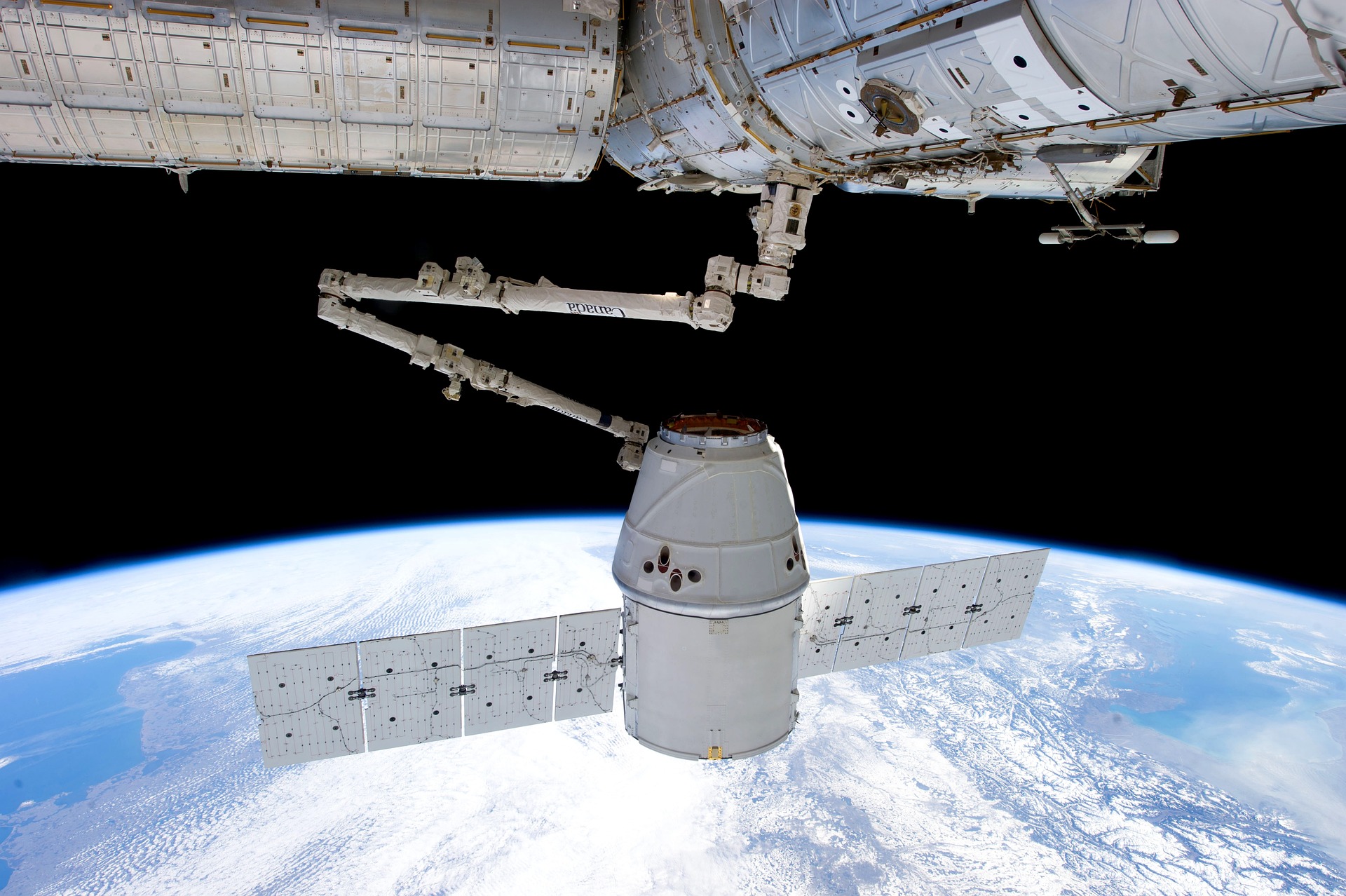
Dragon capsule by SpaceX docking with the International Space Station
Research Problem
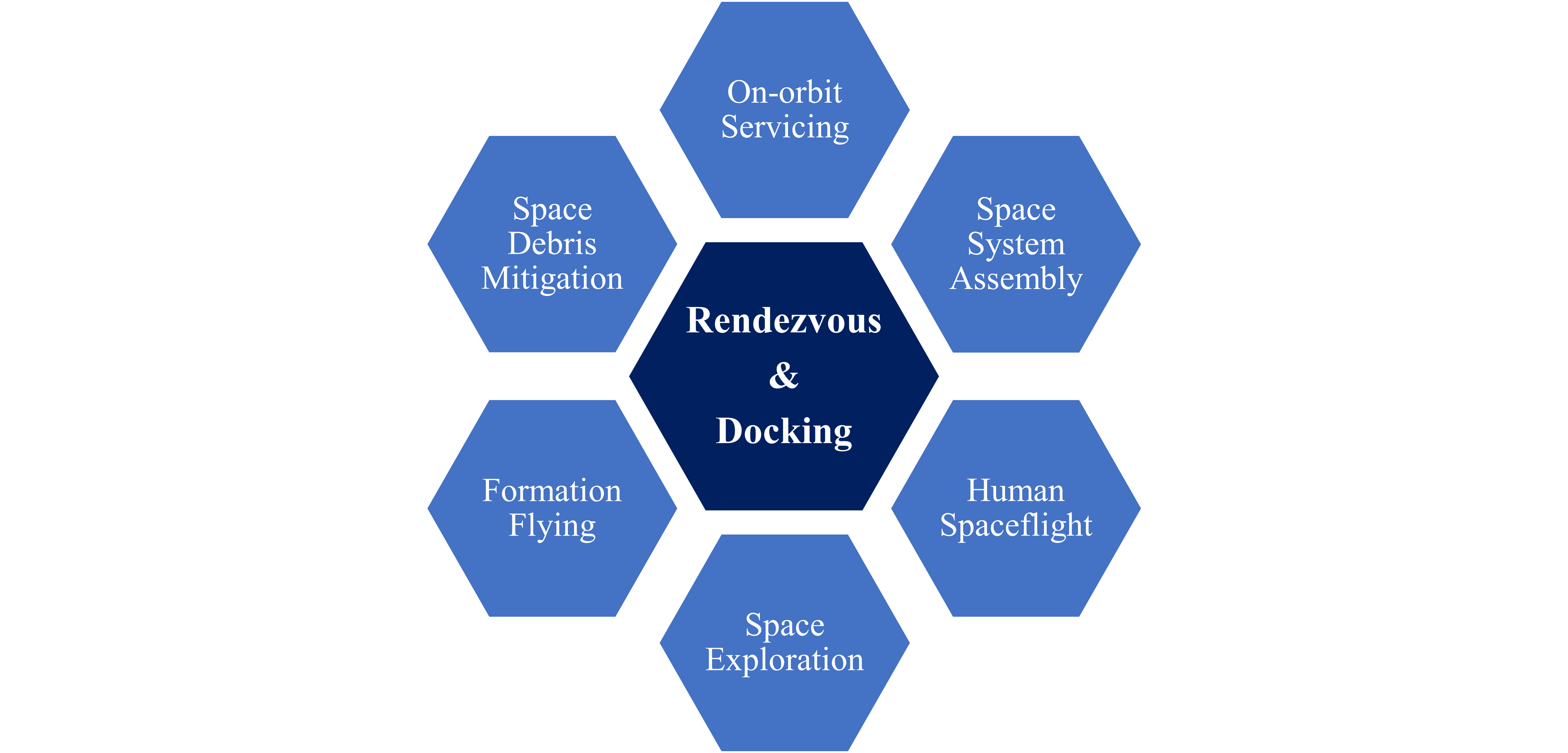
The rapid expansion of space technology in military missions, human spaceflight, space exploration, Earth observation and communication has presented new challenges and opportunities for close-proximity operations.
The greater need for safety of these missions has led to a considerable interest in the development of autonomous control for spacecrafts that are reliable and robust. This research aims to use a class of hybrid actuators that exploit environmental phenomena, to autonomously control spacecrafts for Rendezvous and Docking (R&D) with cooperative or uncooperative targets. The applications of this work would include space system assembly, on-orbit servicing using robotic manipulators. The inclusion of uncooperative targets would facilitate implementation of ways to mitigate the ever-escalating space debris crisis.